Guida autonoma, mobilità integrata, smart city. Siamo sicuri che sono argomenti che appartengono a questo inizio di XXI secolo? Non direi. E la questione ce la racconta Stefano Lazzari, guest author di Motorsport Republic+. Visionario per passione, innovatore per professione, che incrocia new media e new technologies alla ricerca di quel fil rouge che tratteggia il nostro futuro molto prossimo. Questo è il suo primo articolo: come si insegnerà alle macchine a diventare autonome?
Lungo le strade
Quando i pionieri viaggiavano,
si facevano da soli le strade
abbattendo alberi
e costruendo ponti sui fiumi,
le prime strade non erano certo asfaltate:
i carri avanzavano stridendo e traballando,
sopra grosse buche e pietre sconnesse
e a volte le ruote,
dopo la pioggia, si impantanavano.
Era più facile viaggiare
lungo le strade col fondo di tronchi d’albero.
Le diligenze spesso avanzavano sobbalzando
lungo simili “strade di legno”!
Che differenza fra le strade dei pionieri
e quelle su cui potresti viaggiare un giorno!
Forse potrai correre su strade automatiche
con speciali comandi
che accelereranno, faranno rallentare
e perfino manovreranno l’auto al tuo posto!
I Quindici, i libri del come e del perchè, Vol. 6 “come le cose cambiano”, edizione 1967
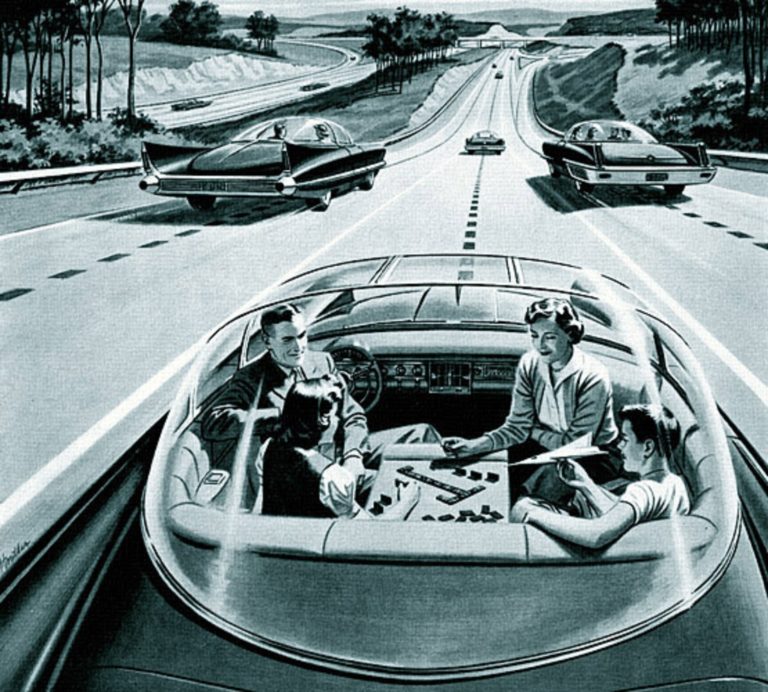
[dropcap]Q[/dropcap]uesta poesiola, che accompagna l’immagine di una famiglia felice trasportata su un’auto futuribile in perfetto stile Googie ¹ , ci racconta la storia di un sogno che oggi si appresta a diventare realtà, l’automobile autonoma che si guida da sè.Se è da poco che ci si applica sulla questione, è da molto che ci si sogna.
Il libro di cui vi parlo, l’enciclopedia per bambini i Quindici ² fa parte della mia infanzia: nel lontano 1967 la visione ci veniva data direttamente dalla sorgente dei sogni radiosi, gli Stati Uniti vittoriosi e ottimisti che ci raccontavano cosa sarebbe stato il futuro, senza se e senza ma.
E’ importante saperlo: la mobilità autonoma, le sue radici culturali e la visione che ha generato i suoi attuali sviluppi affondano direttamente nel New Deal ³ e tramite l’opera di Vannaver Bush 4 giunge nel secondo dopoguerra per arrivare infine, attraverso un “Piano Marshall” culturale e globale, nell’immaginario di una intera generazione: la mia.
Forse è per questo che non mi stupisco se oggi stiamo mettendo in pratica le tecnologie che permettono ad un veicolo di determinare un comportamento in grado di reagire autonomamente ad una situazione dell’ambiente che lo circonda: l’ho letto cinquant’anni fa tondi tondi nella mia cameretta, per buona pace dei Digital Native.
Ma non facciamola facile.
Fin da subito abbiamo da affrontare una questione di una complessità colossale, che da sola vale tutte le questioni successive: cosa si intende per autonomia? Vuol dire che una macchina prende una decisione al posto del pilota, esprimendo il propria volere? Non è così ovviamente. Ma è un’immagine che spaventa e intimorisce.
La prima cosa a cui si pensa è alla perdita del controllo, la seconda è quella che affidare la propria vita ad una “macchina” per quanto “intelligente” non sembra la cosa più saggia da fare. E’ l’aggettivo intelligente, che fa paura. presuppone una volontà, e dunque qualcosa che potenzialmente, potrebbe essere antagonista alla mia.
Lo si pensava, ingenuamente (e lo si pensa ancora) dei computer che depauperano l’uomo del suo “cogito ergo sum” e delle sua abilità, ridotta come nel film di animazione Wall•e a un vescicone molliccio edonista convinto di decidere solo perché può scegliere da un menù. Ovviamente nulla di tutto questo.
Prima di tutto l’ automobile non sarà un dispositivo dotato di identità (pare ovvio, ma è meglio ribadirlo), ma elemento di una vasta rete di oggetti connessi, di cui faranno parte altre automobili, dispositivi e sensori disseminati un po’ ovunque e di un network sofisticato di computer e software: è l’internet delle cose che governerà come un sistema nervoso centrale una gran parte delle attività degli oggetti che ci circondano. Probabilmente l’auto sarà uno dei dispositivi IOT (internet of things) ai vertici della catena tecnologica, questo certamente, perché nulla come la mobilità se ne può avvantaggiare e mettere alla prova dei fatti il complesso sistema che prevediamo unirà persone e oggetti in un’unica rete di comunicazione.
In secondo luogo c’è, però, il fattore tempo, che assieme alla prova dei fatti, mette fra noi e la macchina pensante un bel po’ di handicap. Prima che ci possa essere un’auto completamente senza pilota, si dovrà passare attraverso vari livelli di autonomia, (di cui vi parlerò in un’altro articolo) e che ad oggi vede applicazioni pratiche che necessitano sempre e comunque la presenza di un pilota umano, dotato di favella e raziocinio… almeno si spera.
Le automobili dotate di sistemi di autoguida anche chiamati driverless dunque non faranno che eseguire le istruzioni che gli impartiremo, sotto forma di protocolli su come comportarsi in una data situazione piuttosto che in un’altra. E qui sta il problema: come si insegnerà alle macchine a diventare autonome? Come verranno istruite ad affrontare gli ordinari e già caotici problemi di una quotidiana giornata di traffico, e quali decisioni dovranno prendere invece in caso di un’eccezione, se non di vero pericolo?
COME SI INSEGNERA’ ALLE MACCHINE A DIVENTARE AUTONOME
Oggi, per dare una risposta a questa domanda fondamentale si sono elaborati due diversi paradigmi su cui sviluppare i futuri sistemi di guida autonoma. Questi sistemi si basano su approcci diversi, ma fortunatamente complementari.
Il primo si può definire “Paradigma di percezione mediata” intendendo con questo una combinazione di computer vision, sensor fusion, geolocalizzazione, teoria del controllo e pianificazione del percorso. In sintesi si può definire un approccio “robotico” determinato da un insieme di tecnologie programmate e pensate per percepire l’ambiente e di reagire in base alle contingenze rilevate.
Bello, ma rigido. Immaginiamo di istruire l’automobile a rispettare alla lettera il codice della strada, diamogli un preciso protocollo di sicurezza dei passeggeri e di manutenzione del veicolo, a cui aggiungere tutte le informazioni fisiche necessarie, dalle condizioni meteo a quelle raccolte dagli innumerevoli sensori di cui è dotata. E’ chiaro che avremo un mezzo – generalizzo per rendere l’idea – decisamente ottuso e così vincolato da rendere la mobilità probabilmente più problematica di quanto non sia già.
Gli manca di essere… smart, di capire e attuare tutte le innumerevoli sfumature che gli permette di muoversi all’interno di un contesto che necessita di essere compreso velocemente e che la metta nelle condizioni di dover decidere, fra le tanti soluzioni disponibili non quella più corretta, ma quella più giusta in quel momento.
Il secondo si può definire come “Paradigma di clonazione comportamentale” e prevede la formazione di una rete neurale artificiale che recepisce gli input del pilota e dei sensori, li rielabora e li utilizza come “schema mentale” a seconda delle condizioni ambientali in cui opera il mezzo. Un approccio dunque dove l’Intelligenza Artificiale controlla il mezzo sulla base di una libreria di comportamenti appresi: coinvolge la formazione di una singola rete neurale in grado di trasferire i diversi ingressi dei sensori e gestire sterzo, acceleratore, freno e quant’altro sulla base di una esperienza acquisita. Questo approccio è talvolta chiamato guida end-to-end o “apprendimento profondo”.
Geniale, ma dannatamente complicato. Questa soluzione vuole dare una risposta al semplice problema che potremmo sintetizzare così: “senti, non puoi dare un po più di gas, che siamo in ritardo? Così perdiamo l’aereo…” Un sistema a percezione mediata nemmeno vi ascolterebbe, dovrebbe disattendere i protocolli e fare scelte arbitrarie, cosa per la quale non è pensato. Oggi ci pensa il pilota a passare da una guida conforme alle regole o… meno e in una frazione di secondo decidere di volta in volta se e cosa fare. Anche contravvenendo alle regole.
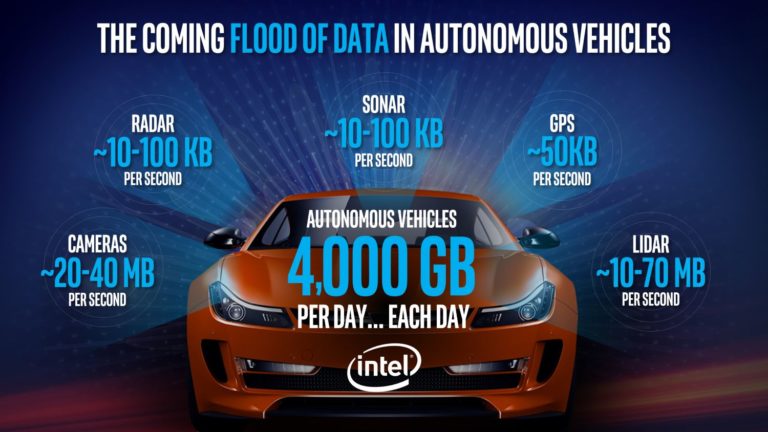
Questo secondo approccio inoltre determina un incremento massiccio del già enorme carico di dati e informazioni che le auto driverless generano e ricevono dall’ambiente circostante. Si parla che ogni auto quotidianamente creerà quattromila gigabyte di dati (fonte: Intel) senza contare quello che riceverà dalla rete dei dispositivi a terra e dalla geolocalizzazione, che per necessità di velocità dovranno essere accessibili immediatamente. I server remoti del Cloud Computing, troppo lontani, non andranno più bene, e per questo si è pensato ad un nuovo sistema chiamato Fog Computing, dove i server saranno più vicini, più veloci e bassi, come la nebbia rispetto alle nuvole.
LE CONCLUSIONI
Quale dei due paradigmi prenderà il sopravvento? Probabilmente nessuno dei due, molto probabilmente si farà strada un sistema ibrido, capace di mettere assieme i due modelli, quello ambientale e quello culturale in uno scenario in grado di rispondere al meglio a tutte le le necessità dell’autoguida unendo le eccellenze dei due sistemi. D’altronde l’ibridazione fra paradigmi è una delle tendenze in atto, e non è un caso che balza all’occhio la similitudine fra queste teorie e quelle dell’antropologia sociale, che vede il riavvicinarsi ai sostenitori delle tesi ambientale contrapposti ai fautori dello sviluppo culturale nella definizione dell’evoluzione della cultura umana.
Uomini e automobili definiti dagli stessi modelli comportamentali? forse un giorno sarà così.